


ʻO ka mīkini hāʻawi ʻike papahele ʻōmaʻomaʻo GR-FD10


Ka palena o ka mea hana:
| Hoʻohālike | GR-FD10 |
| X-axis | 550mm |
| Y-axis | 300mm |
| Z-axis | 100mm |
| Z-axis haawe | 10Kg |
| Haawe Y-axis | 8Kg |
| XY neʻe velocity | 0~800mm/sec |
| Z neʻe wikiwiki | 0~300mm/sec |
| ʻO ke anawaena liʻiliʻi o ke kāpili pulupulu | 0.2mm (e pili ana i nā waiwai glue) |
| Hiki hou | ± 0.02 mm/ Axi |
| huaʻōlelo | gluing machines |
| Ke ano kalaiwa | Stepper motor + synchronous kāʻei + pololei alakaʻi kaʻaahi |
| Kāmeʻa | 1.3 megapixel / 5 megapixel koho |
| Hoʻohaʻahaʻa waho (L*W*H) | L(1200)*W(950)*H(1910) |
| Hāʻawi mana hoʻokomo | 220V/50HZ |
| Ke ano hookele | Motor Servo + wili pololei + kaʻa alakaʻi pololei |
| ʻano hōʻike | Mākaʻikaʻi |
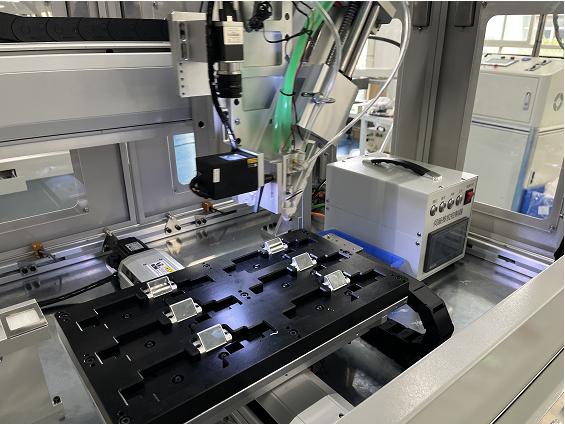
Nā hiʻohiʻona o ka hāmeʻa:
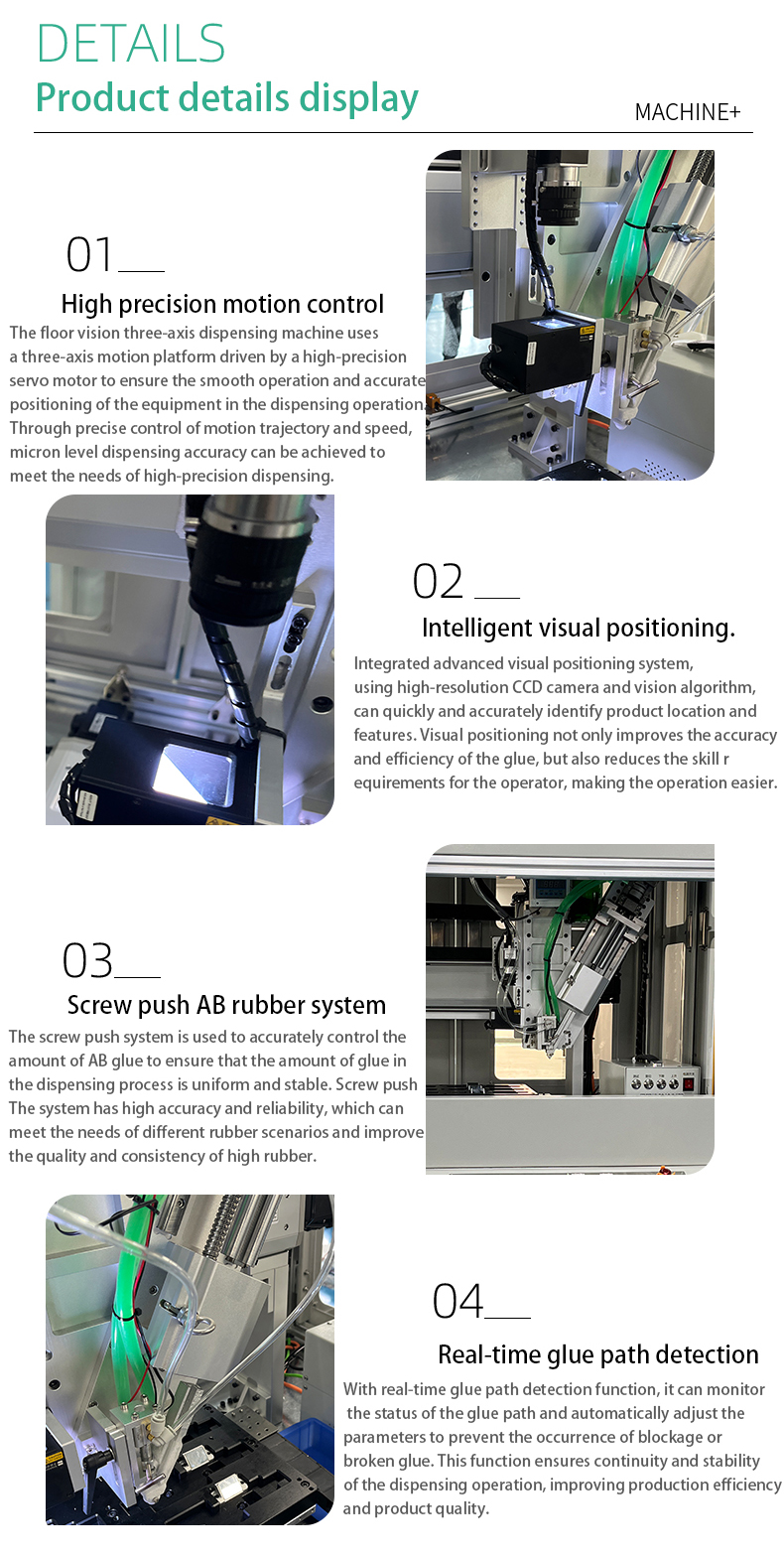
1.High precision motion control Ke hoʻohana nei ka mīkini hoʻoheheʻe ʻekolu axis i kahi ʻekolu-axis motion platform i alakaʻi ʻia e ka mīkini servo kiʻekiʻe e hōʻoia i ka hana maʻalahi a me ka hoʻonohonoho pono ʻana o nā mea hana i ka hana hoʻopuka. Ma o ka mana pololei o ka neʻe ʻana a me ka wikiwiki, hiki ke hoʻokō i ka pololei o ka dispensing level micron e hoʻokō i nā pono o ka dispensing kiʻekiʻe.
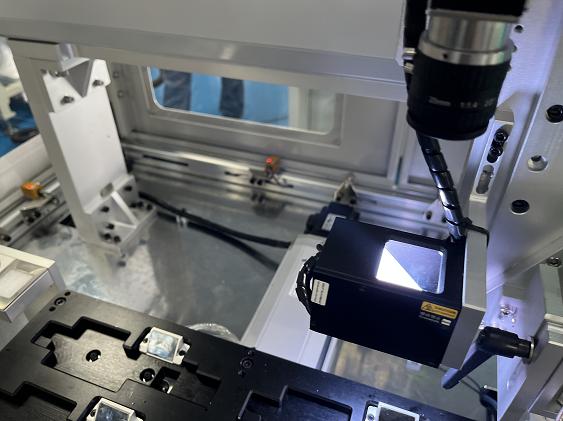
2.Intelligent visual positioning Hoʻopili ka mea hana i kahi ʻōnaehana hoʻonohonoho ʻike kiʻekiʻe e hoʻohana ana i nā kāmeʻa CCD kiʻekiʻe a me nā algorithms hihiʻo e ʻike wikiwiki a pololei i nā wahi huahana a me nā hiʻohiʻona. ʻAʻole hoʻomaikaʻi wale ke kūlana hiʻohiʻona i ka pololei a me ka maikaʻi o ke kāpili, akā e hōʻemi ana i nā koi akamai no ka mea hoʻohana, e maʻalahi ka hana.
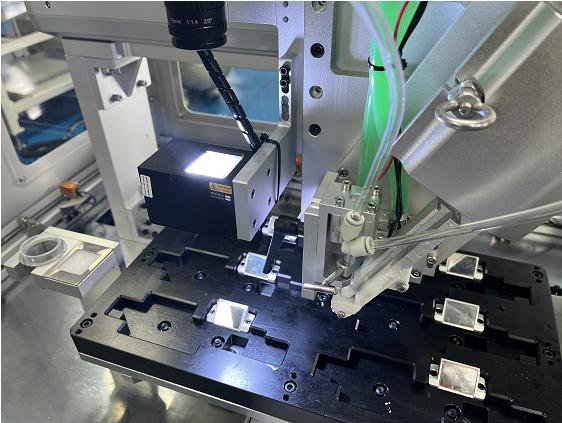
3.Screw push AB system rubber Ua hoʻohana nā mea hana i ka ʻōnaehana hoʻopaʻa uila e hoʻomalu pono i ka nui o ke kāʻei AB e hōʻoia i ka nui o ke kāpili i loko o ke kaʻina o ka hāʻawi ʻana he ʻano like a paʻa. He kiʻekiʻe ka pololei a me ka hilinaʻi o ka ʻōnaehana screw push, hiki ke hoʻokō i nā pono o nā hiʻohiʻona glue ʻokoʻa a hoʻomaikaʻi i ka maikaʻi a me ke kūpaʻa o ke kāpili kiʻekiʻe.
4. ʻO ka CCD ʻelua-dimensional code scanning function Ma ka hoʻohui ʻana i ka CCD two-dimensional code scanning function, hiki i ka hāmeʻa ke hoʻomaopopo koke i ka ʻike code ʻelua-dimensional ma ka huahana no ka loaʻa ʻana o ka traceability a me ka hoʻokele batch. Hoʻonui kēia mana i ka ʻike a me ka mana o ke kaʻina hana, hāʻawi i ka hoʻomaikaʻi ʻana i ka maikaʻi o ka huahana a me ka ʻoluʻolu o ka mea kūʻai aku.
5.Real-time rubber path detection Loaʻa i nā mea hana ka hana ʻike ala glue i ka manawa maoli, hiki ke nānā i ke kūlana o ke ala glue a hoʻoponopono maʻalahi i nā ʻāpana e pale ai i ka hiki ʻana mai o ka blockage a i ʻole ka haki ʻana. Mālama kēia hana i ka hoʻomau a me ka paʻa o ka hana hāʻawi, hoʻomaikaʻi i ka hana hana a me ka maikaʻi o ka huahana.
6. Hoʻohana ʻia ka hana kanaka Ua hoʻolako ʻia ka hāmeʻa me kahi intuitive a me ka launa hana hoʻohana, kahi kūpono no ka mea hoʻohana e hoʻonohonoho i nā ʻāpana a nānā i ke kaʻina hana hoʻopuka. He maʻalahi a maopopo ka hoʻolālā interface, maʻalahi ka hana, a hoʻemi ʻia ka paʻakikī o ka hana a me ka pilikia o ka hana hewa.
7.Stable a me ka hilinaʻi hana ʻO ka mīkini hoʻoheheʻe kiʻekiʻe ʻekolu-axis i hoʻopaʻa ʻia i ka papahele i hana ʻia i nā mea kiʻekiʻe kiʻekiʻe a me ka ʻenehana mīkini pololei, me ka paʻa a me ka hilinaʻi maikaʻi. Hiki i nā mea hana ke hana mau no ka manawa lōʻihi a mālama i ka hana dispensing paʻa e hoʻokō i nā pono o ka hana nui.



Māhele huahana
-

ʻO ka Mīkini Lopako Hoʻokaʻawale ʻokoʻa no 18650 Ba...
-

'Ōmaʻomaʻo 'akomi lua-ʻokoʻa āpau-i-hoʻokahi kelu ...
-

ʻO ka mea hoʻopili paʻa Semi Automatic Fluid...
-

ʻO ka ʻoihana ʻenehana Rotating Dispenser 4 axis ...
-

ʻO ka mīkini hoʻoheheʻe ʻike ʻia ʻo Green Desktop GR-DT42...
-

ʻO Green GR-FD15 Dispenser Industrial Floor Type D...





